
Research
The aim of our research group is to develop robots that can interact with the physical world safely and robustly. We leverage high-resolution tactile sensing, visual understanding of objects in the scenes and robot learning to enable the robots to have such desirable capabilities.
High-resolution tactile sensing
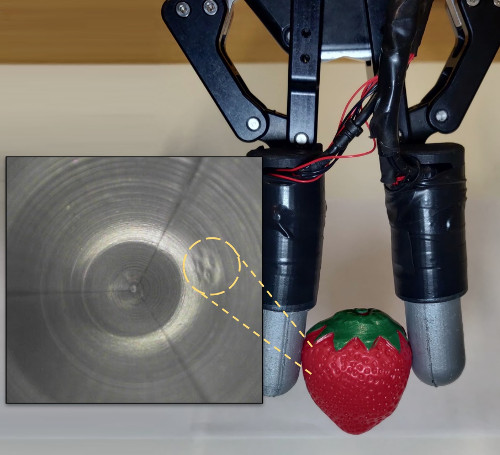 GelTip: A Finger-shaped Optical Tactile Sensor for Robotic Manipulation
GelTip: A Finger-shaped Optical Tactile Sensor for Robotic Manipulation
D.F. Gomes, Z. Lin, S. Luo. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2020.
[paper] [website] [STL files]
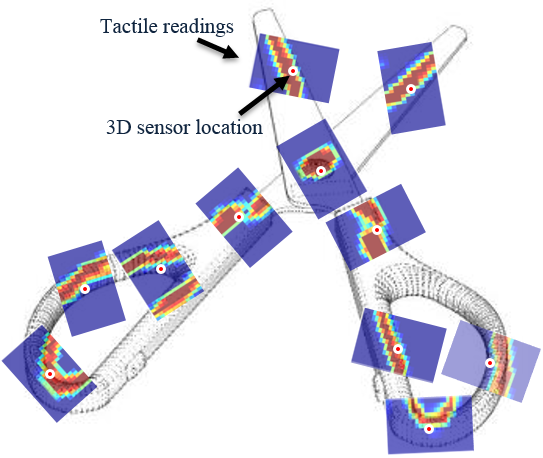
 Blocks World of Touch: Exploiting the Advantages of All-around Finger Sensing in Robot Grasping
Blocks World of Touch: Exploiting the Advantages of All-around Finger Sensing in Robot Grasping
D.F. Gomes, Z. Lin, S. Luo. Frontiers in Robotics and AI 7, 541661, 2020.
[paper] [website]
Simulation of optical tactile sensors
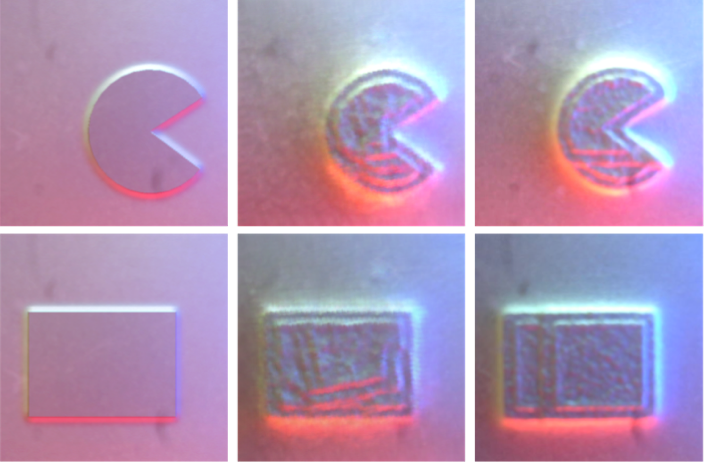
 Generation of gelsight tactile images for sim2real learning
Generation of gelsight tactile images for sim2real learning
D.F. Gomes, P. Paoletti, S. Luo. IEEE Robotics and Automation Letters, 6(2), pp.4177-4184. & The International Conference on Robotics and Automation (ICRA) 2021.
[paper] [website] [code]
 Reducing Tactile Sim2Real Domain Gaps via Deep Texture Generation Networks
Reducing Tactile Sim2Real Domain Gaps via Deep Texture Generation Networks
T. Jianu, D.F. Gomes, P. Paoletti, S. Luo. IEEE International Conference on Robotics and Automation (ICRA) 2022.
[paper] [website]
 Tacchi: A Pluggable and Low Computational Cost Elastomer Deformation Simulator for Optical Tactile Sensors
Tacchi: A Pluggable and Low Computational Cost Elastomer Deformation Simulator for Optical Tactile Sensors
Z. Chen, S. Zhang, S. Luo, F. Sun, B. Fang IEEE Robotics and Automation Letters, 2023.
[paper] [website]
Robot Perception of Flexible Materials with Vision and Tactile Sensing
 Visual-Tactile Multimodality for Following Deformable Linear Objects Using Reinforcement Learning
Visual-Tactile Multimodality for Following Deformable Linear Objects Using Reinforcement Learning
L. Pecyna, S. Dong, S. Luo. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2022.
[paper] [code]
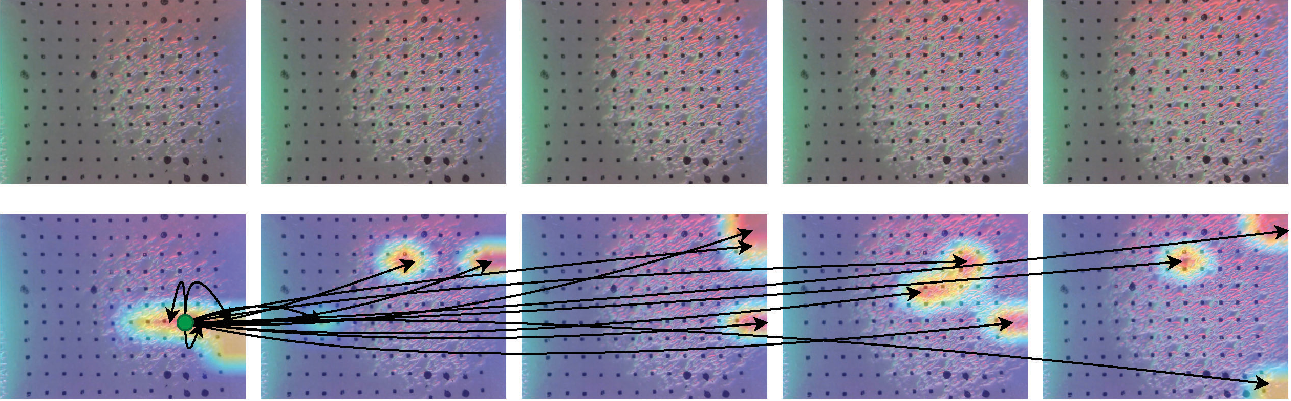 Spatio-temporal attention model for tactile texture recognition
Spatio-temporal attention model for tactile texture recognition
G. Cao, Y. Zhou, D. Bollegala, S. Luo. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2020. [paper]
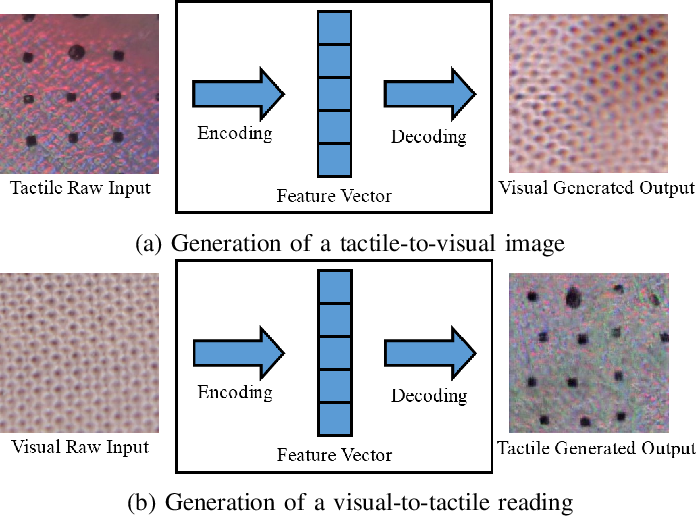 “Touching to See” and “Seeing to Feel”: Robotic Cross-modal SensoryData Generation for Visual-Tactile Perception
“Touching to See” and “Seeing to Feel”: Robotic Cross-modal SensoryData Generation for Visual-Tactile Perception
J.-T. Lee, D. Bollegala, S. Luo. IEEE International Conference on Robotics and Automation (ICRA) 2019.
[paper]
 iCLAP: Shape Recognition by Combining Proprioception and Touch Sensing
iCLAP: Shape Recognition by Combining Proprioception and Touch Sensing
S. Luo, W. Mou, K. Althoefer and H. Liu. Autonomous Robots 2019.
[paper]
Iterative closest labeled point for tactile object shape recognition S. Luo, W. Mou, K. Althoefer and H. Liu. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2016. [paper]
 ViTac: Feature Sharing between Vision and Tactile Sensing for Cloth Texture Recognition
ViTac: Feature Sharing between Vision and Tactile Sensing for Cloth Texture Recognition
S. Luo, W. Yuan, E. Adelson, A. G. Cohn and R. Fuentes. IEEE International Conference on Robotics and Automation (ICRA) 2018. [paper] [dataset]
Robot Perception of Transparent Objects with Vision and Tactile Sensing
 A4T: Hierarchical Affordance Detection for Transparent Objects Depth Reconstruction and Manipulation
A4T: Hierarchical Affordance Detection for Transparent Objects Depth Reconstruction and Manipulation
J. Jiang, G. Cao, T.-T. Do, S. Luo. IEEE Robotics and Automation Letters & IEEE 18th International Conference on Automation Science and Engineering (CASE) 2022 - Best Student Paper Award Finalist. [paper] [website] [dataset]
 Where shall I touch? Vision-Guided Tactile Poking for Transparent Object Grasping
Where shall I touch? Vision-Guided Tactile Poking for Transparent Object Grasping
J. Jiang, G. Cao, A. Butterworth, T.-T. Do, S. Luo. IEEE/ASME Transactions on Mechatronics 2022.
[paper] [website] [code] [dataset]
Minorities Matter: Long-tailed Object Recogntion
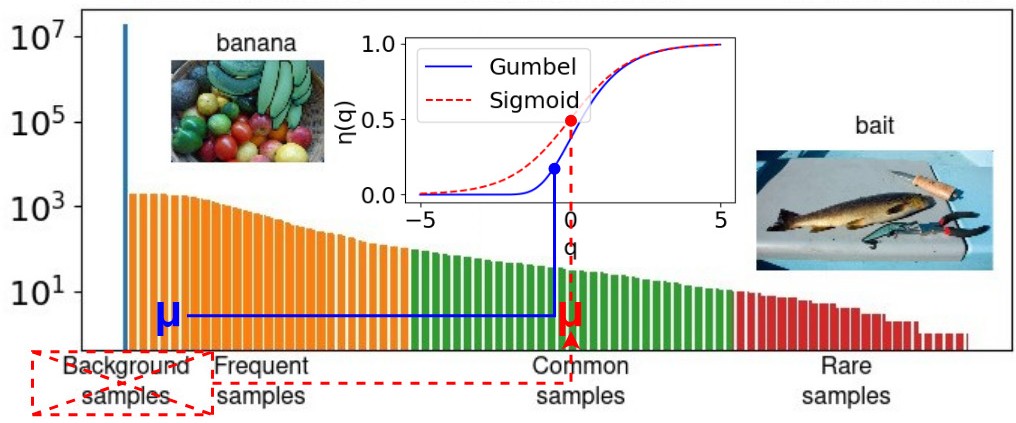 Long-tailed Instance Segmentation using Gumbel Optimized Loss
Long-tailed Instance Segmentation using Gumbel Optimized Loss
K. P. Alexandridis, J. Deng, A. Nguyen, S. Luo. European Conference on Computer Vision (ECCV) 2022.
[paper] [code]